Project Team: Jeff Maeshiro, Jia Wu, Mary Sek
Advisors: Jason Kelly Johnson and Michael Shiloh, California College of the Arts
Location: San Francisco, California, USA
Year: 2013
Publications: ACADIA 2014
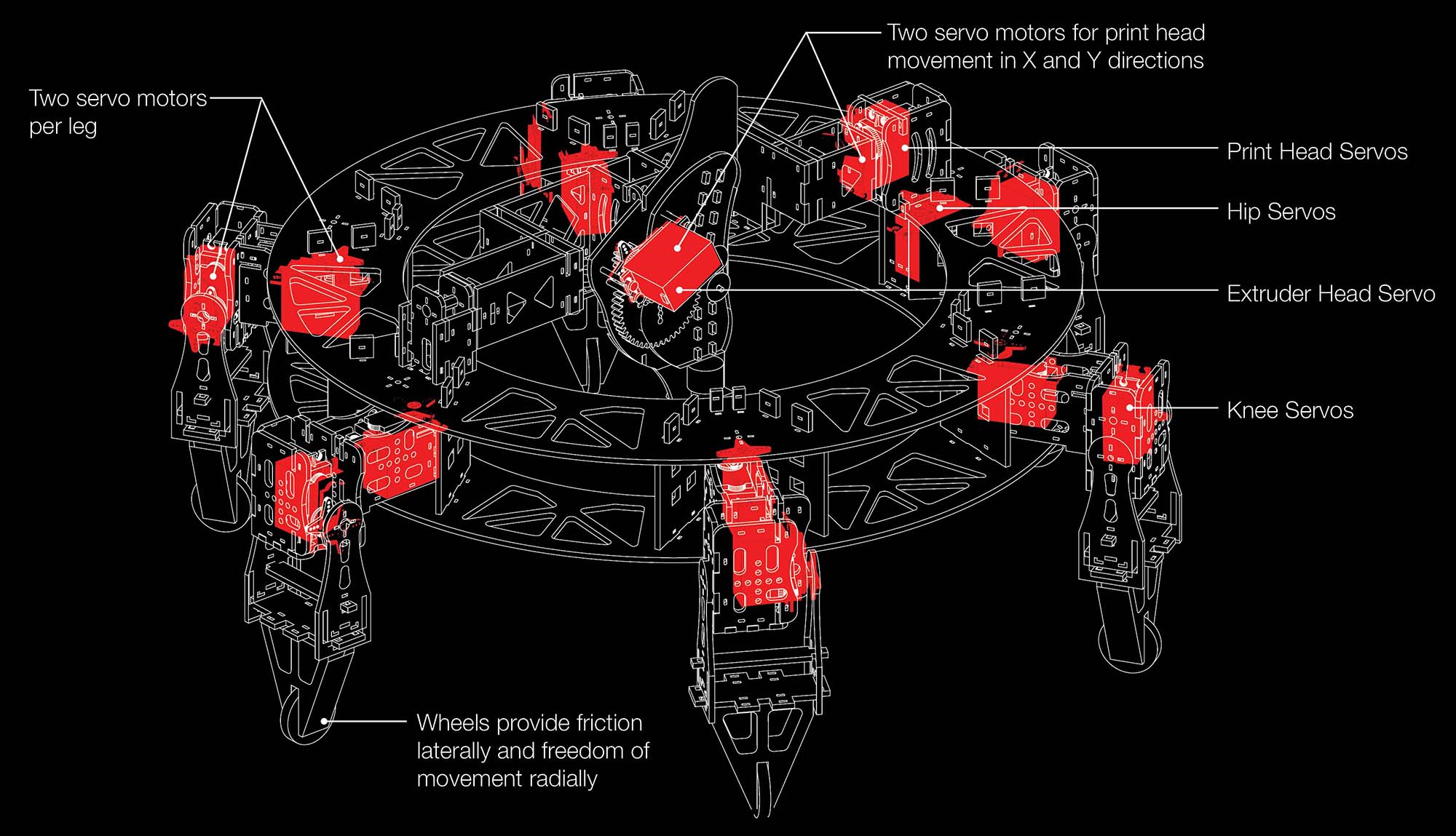
Materials: Laser-cut plywood, Servo motors, Custom extruder, Arudino Uno, Servo shield
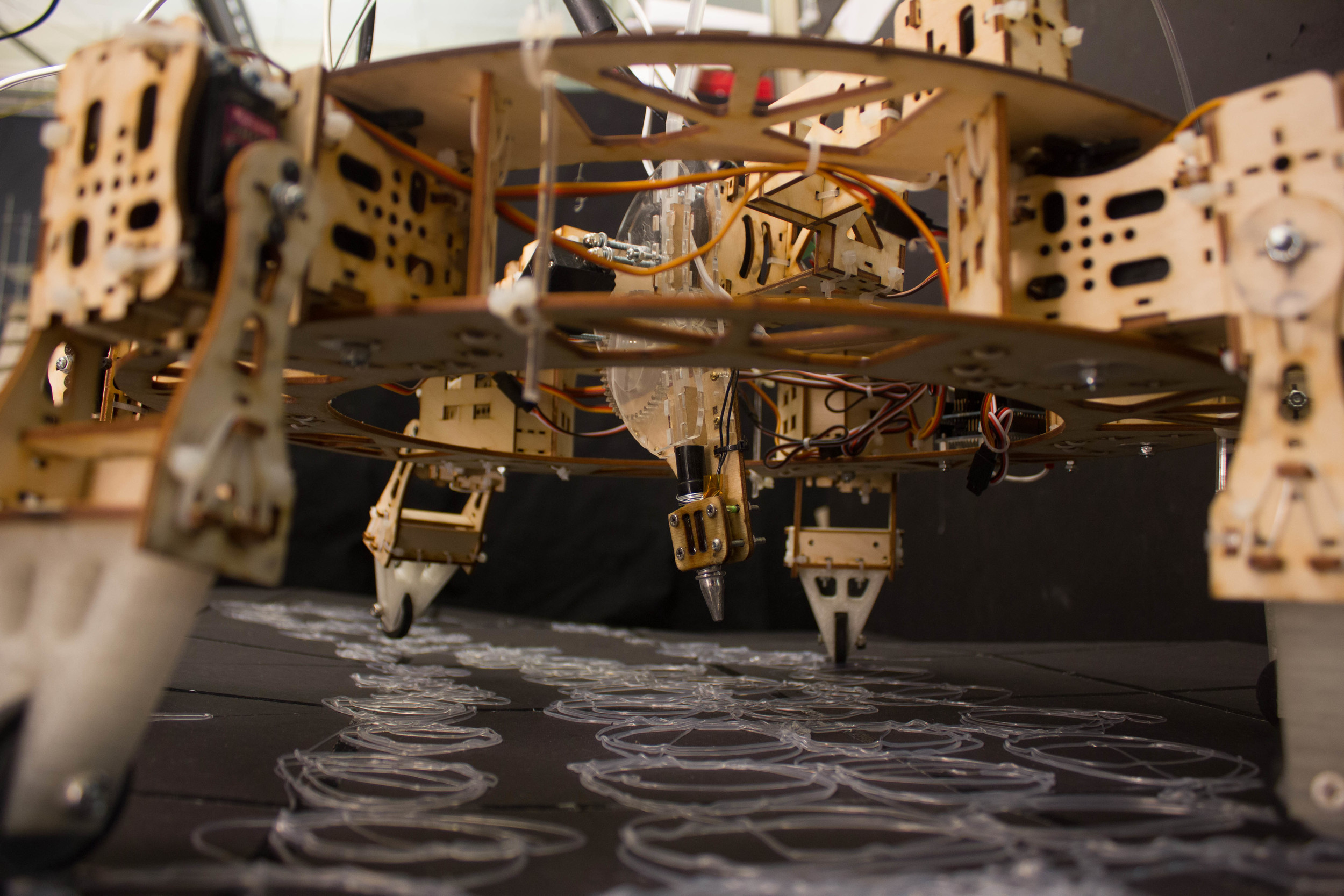
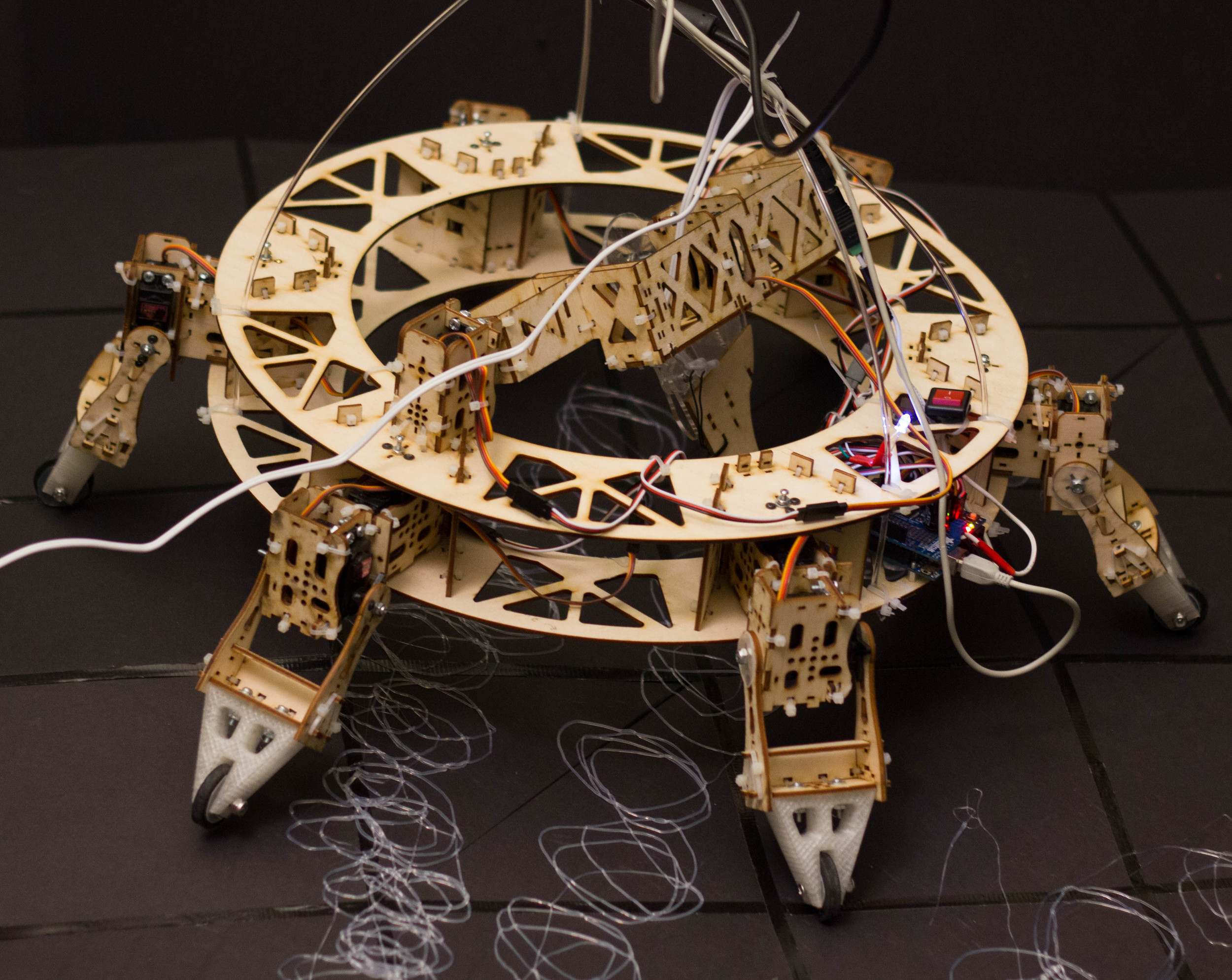
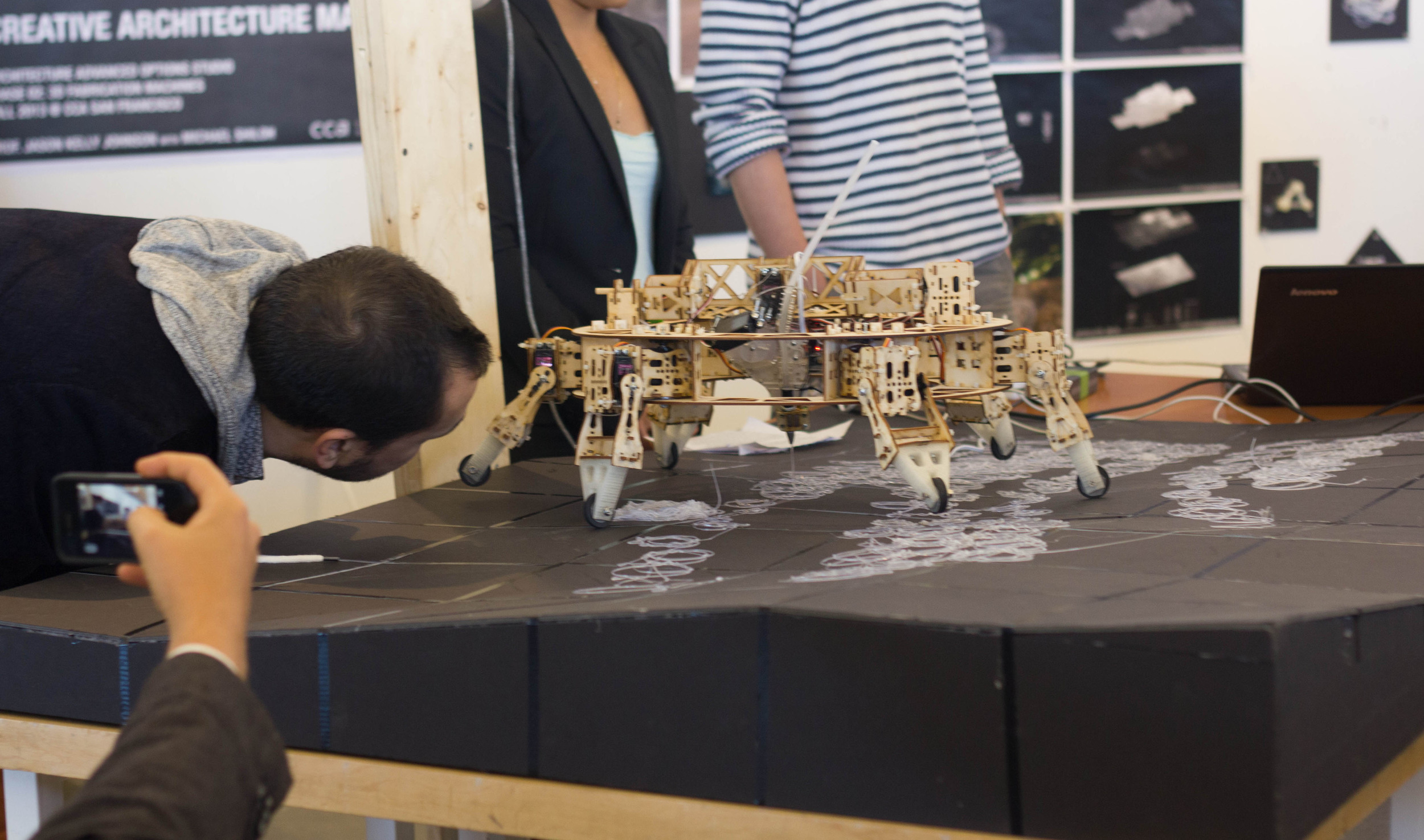
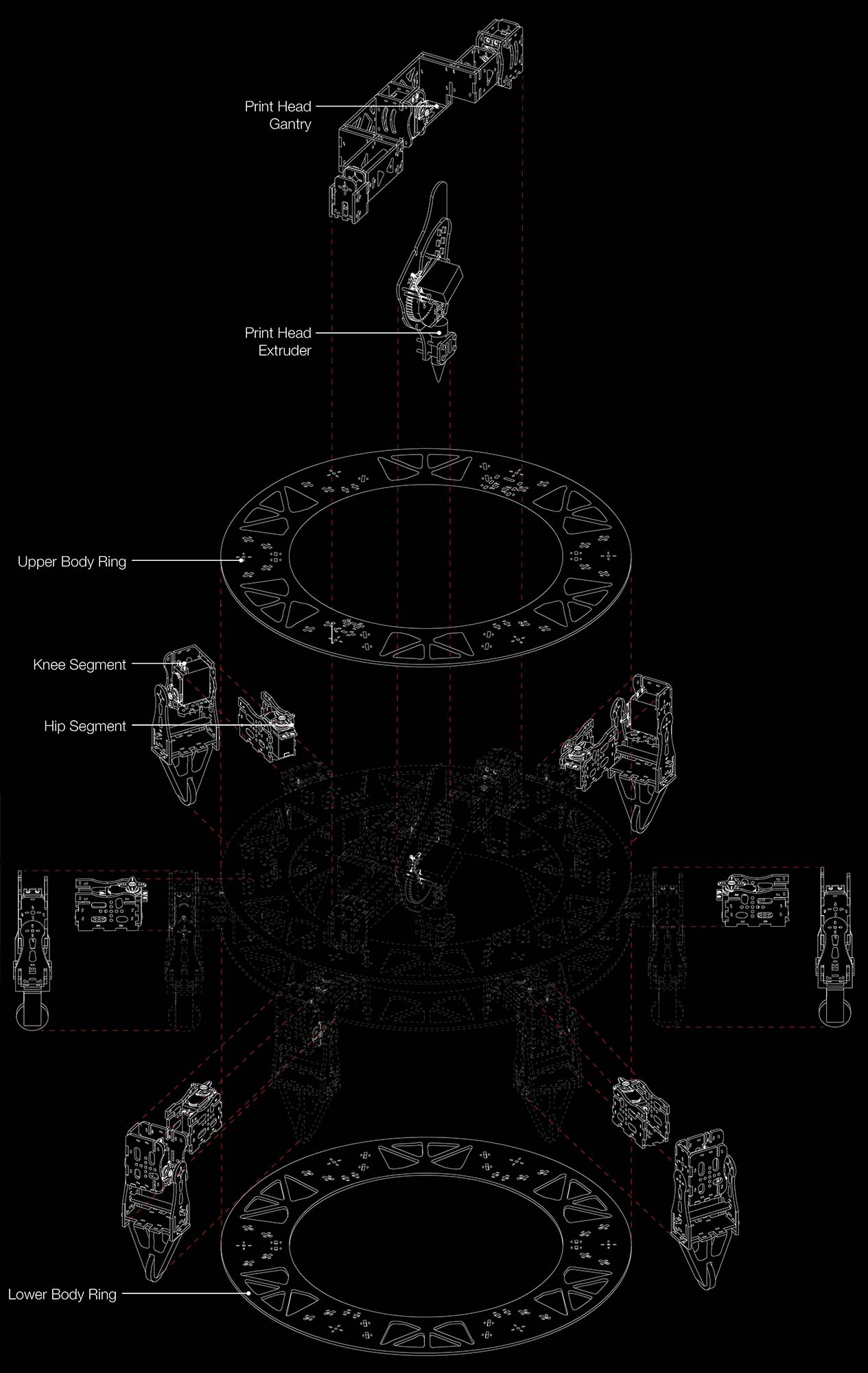
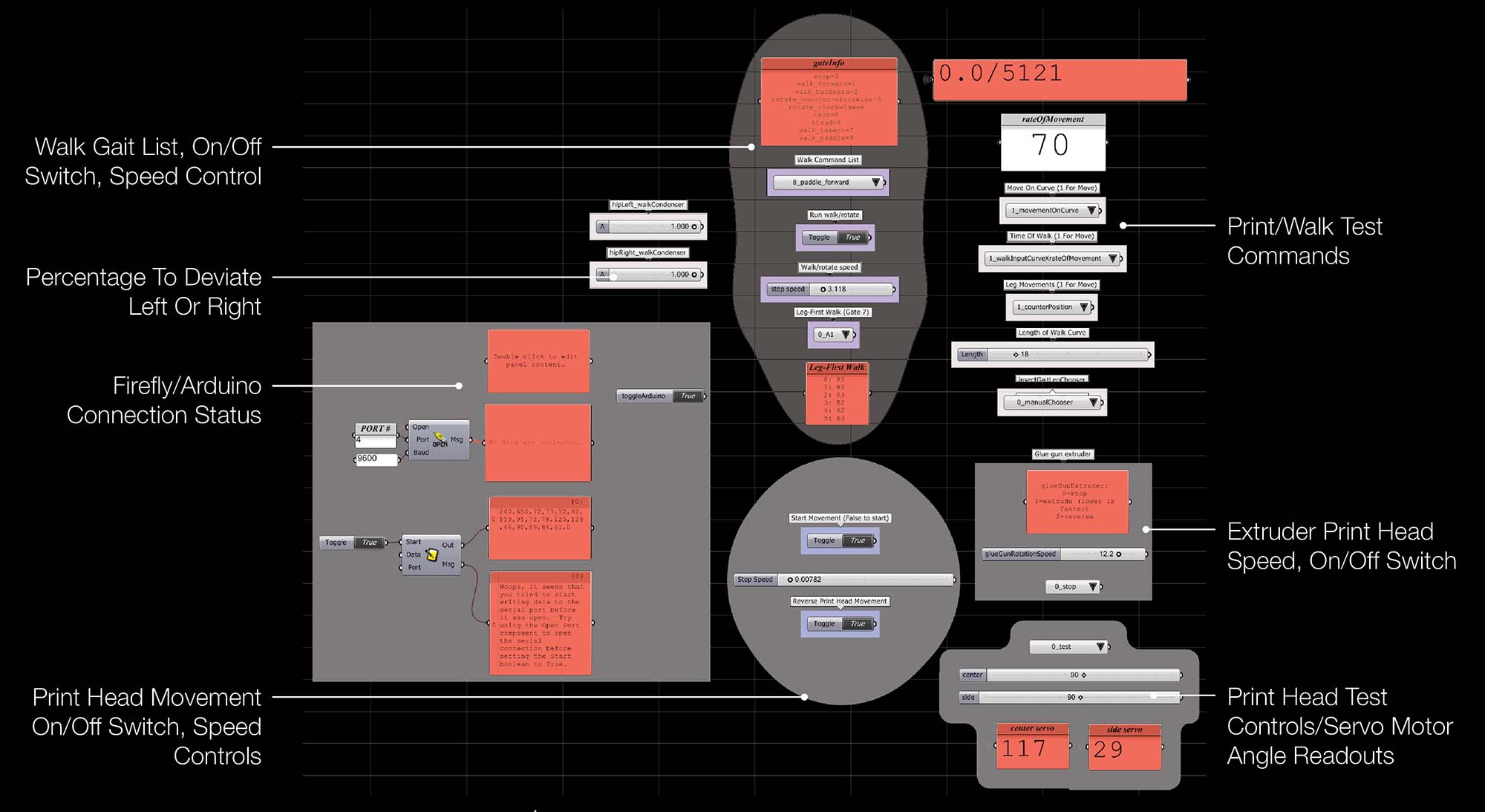
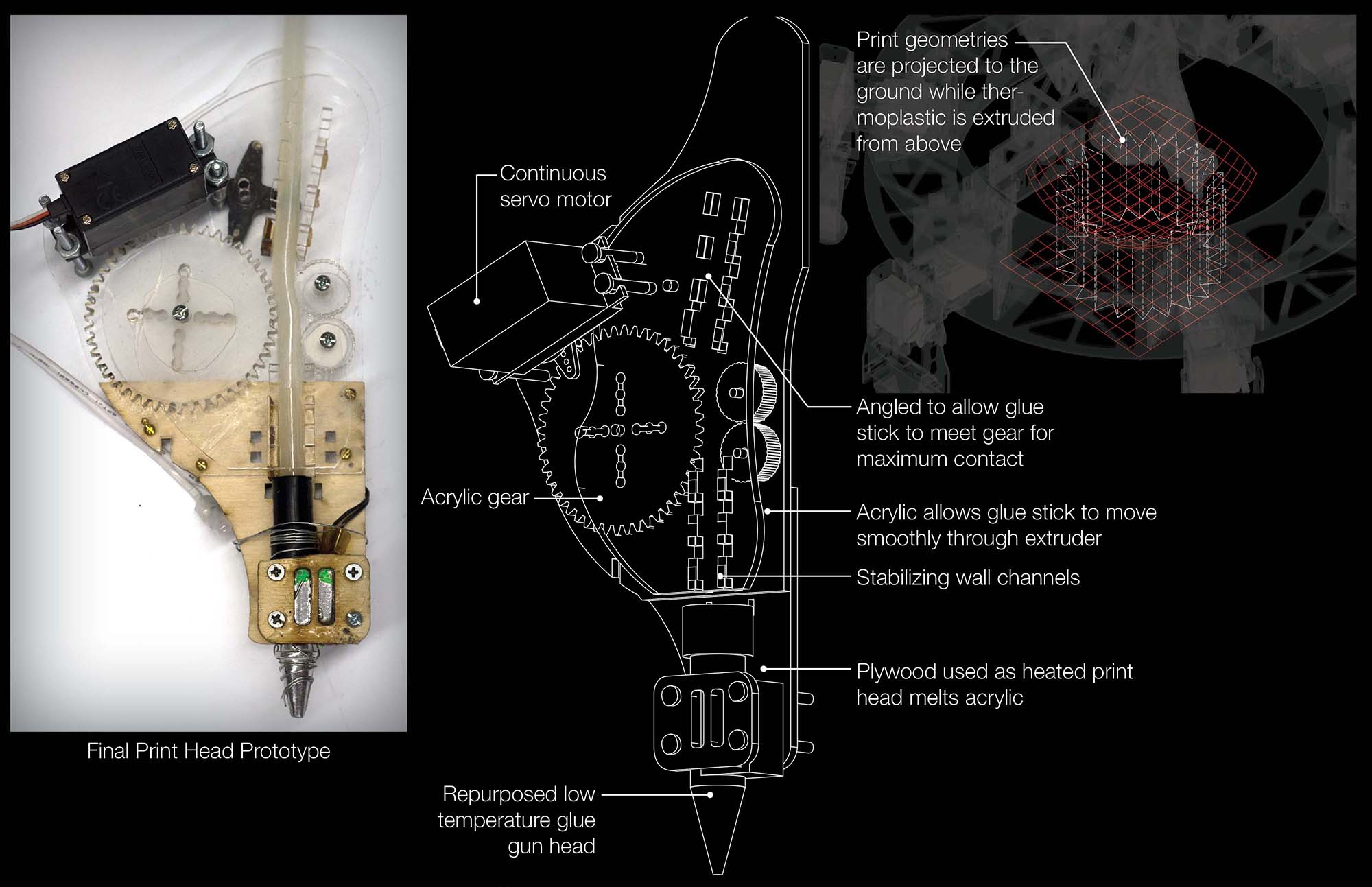
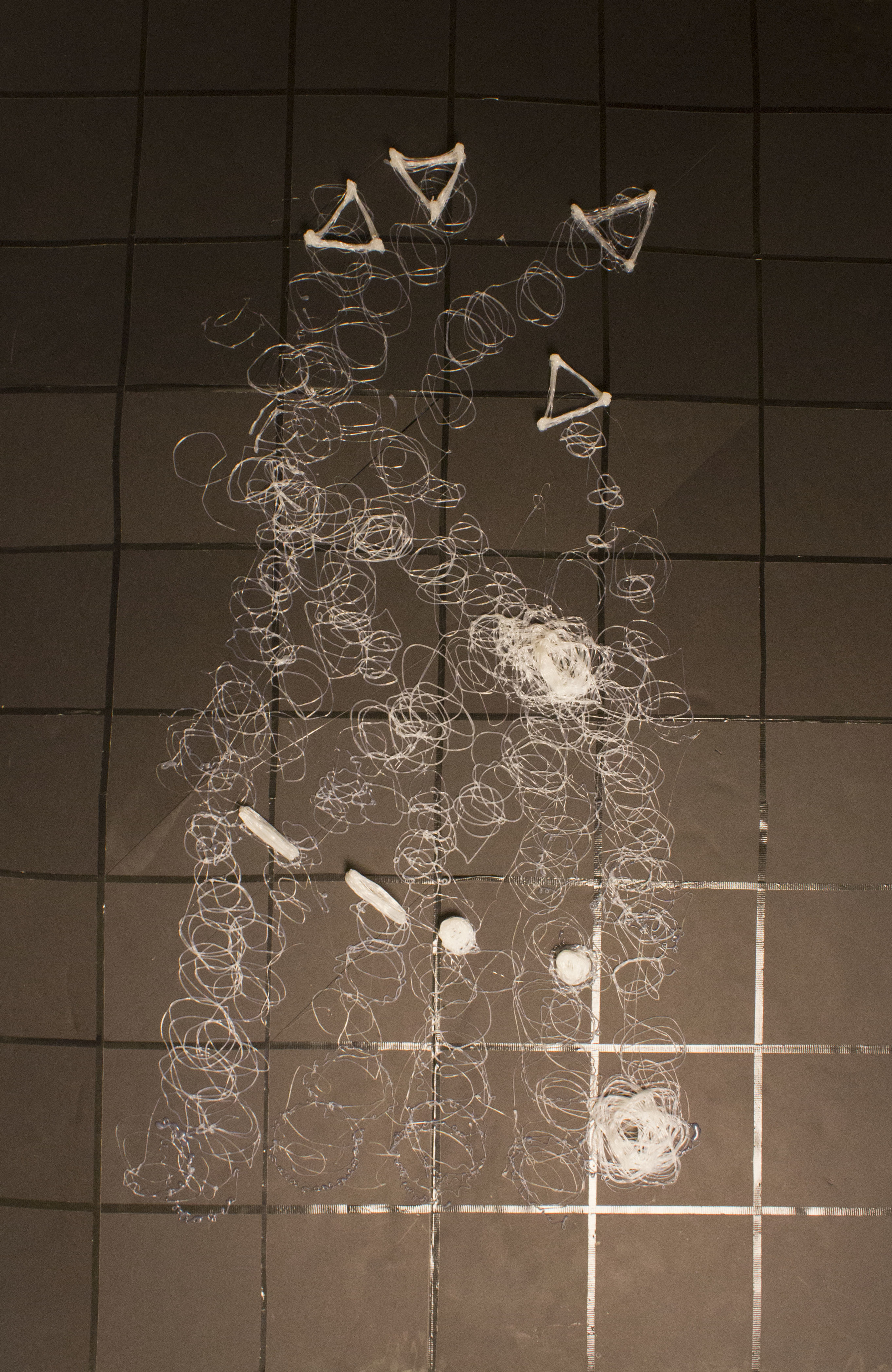
Geoweaver is a hexapod, a six-legged walking robot, that extrudes thermoplastic as it walks to produce two- and three-dimensional objects, designed and prototyped in the Creative Architecture Machines advanced options studio at CCA taught by Jason Kelly Johnson of Future Cities Lab and Michael Shiloh (the instructions for building one can be found at Instructables.com). The hexapod robot-type was chosen for it’s ability to traverse unstable terrain with smooth precision. Each leg is powered by two servo motors while a gantry swings the print head in the XY plane using another pair of servo motors, and a continuous servo motor which feeds the thermoplastic through the extrusion head. The servos are controlled by an Arduino micro controller which in turn receives commands from Firefly, a plugin to the Grasshopper component of Rhino. A webcam mounted above the print bed is utilized for machine-vision, tracking Geoweaver’s location through a reacTIVision fiducial marker, allowing Firefly to calibrate it’s accuracy with the digital model.
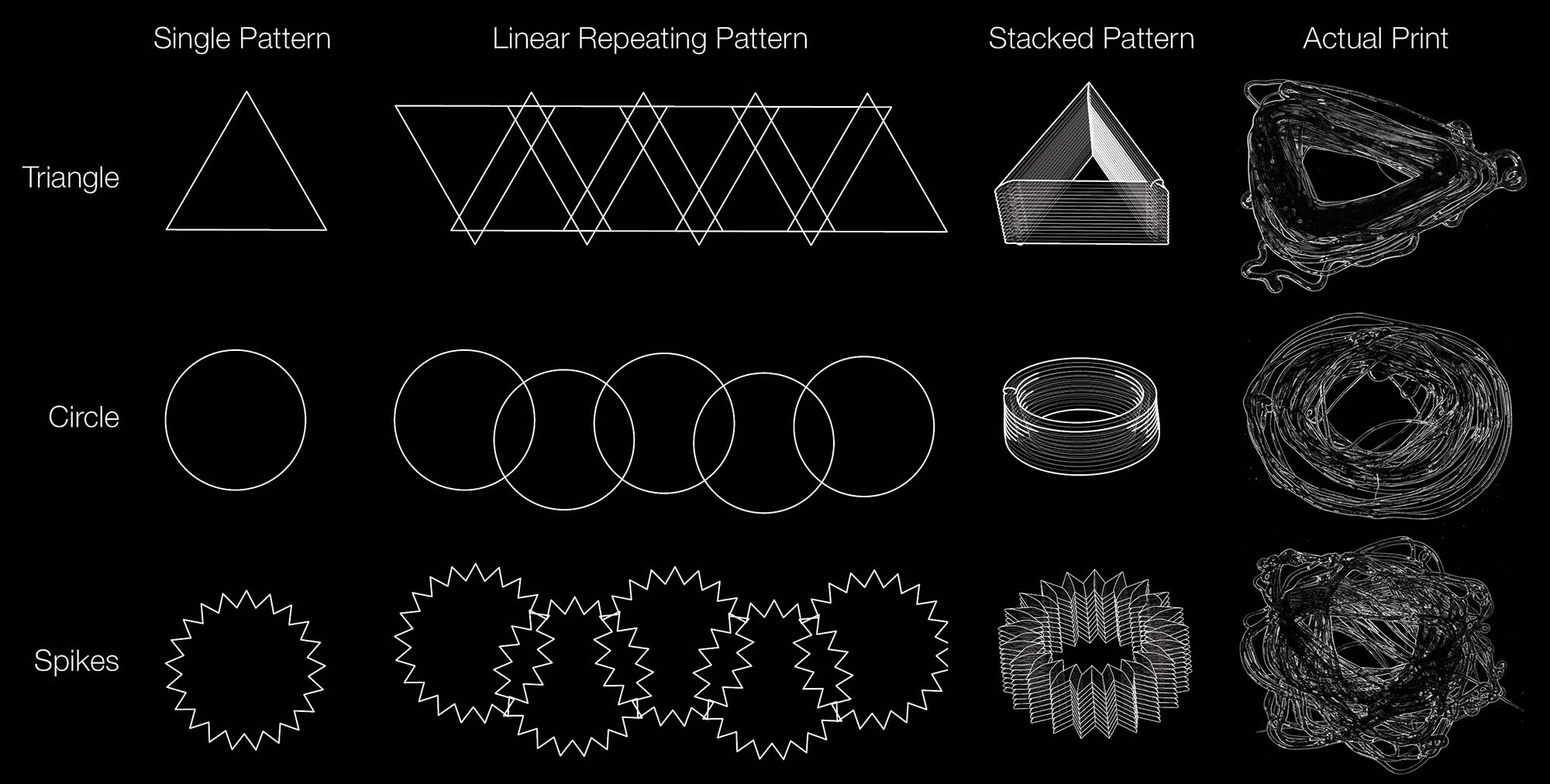
Geoweaver is the culmination of 62 days of research and development, beginning with a wide range of material studies and hexapod prototypes at different scales. The final “glue gun” extruder was chosen for it’s light weight and ease of use. Parallel to the hexapod and print head research was the Firefly control systems studies. Firefly and Grasshopper allows Geoweaver to receive complex geometric patterns as well as real world/realtime data, such as machine vision tracking or Twitter feeds. Grasshopper’s parametric capabilities also allows Geoweaver to experiment with endless walking pattern algorithms, choosing the best fit for the print job at hand.
Scaling up, Geoweaver has the potential to bring satellite level intelligence to actors on the ground. By translating data into real-world parameters Geoweaver could incorporate weather patterns, soil movements, topographies, and other local conditions into it’s prints in real time. At this larger scale Geoweaver could lay down the infrastructure for future settlements, such as geotextiles, water catchment units and storage facilities, laying out entire cities with digital precision.
Geoweaver has been featured in:
suckerPunch
Architect Magazine, twice
Hackaday
Architectural Review
Architizer
The Possible Mediums Exhibition at Michigan Taubman College of Architecture and Urban Planning
Bay Area Maker Faire 2014
And much more news can be found here.